

“`html
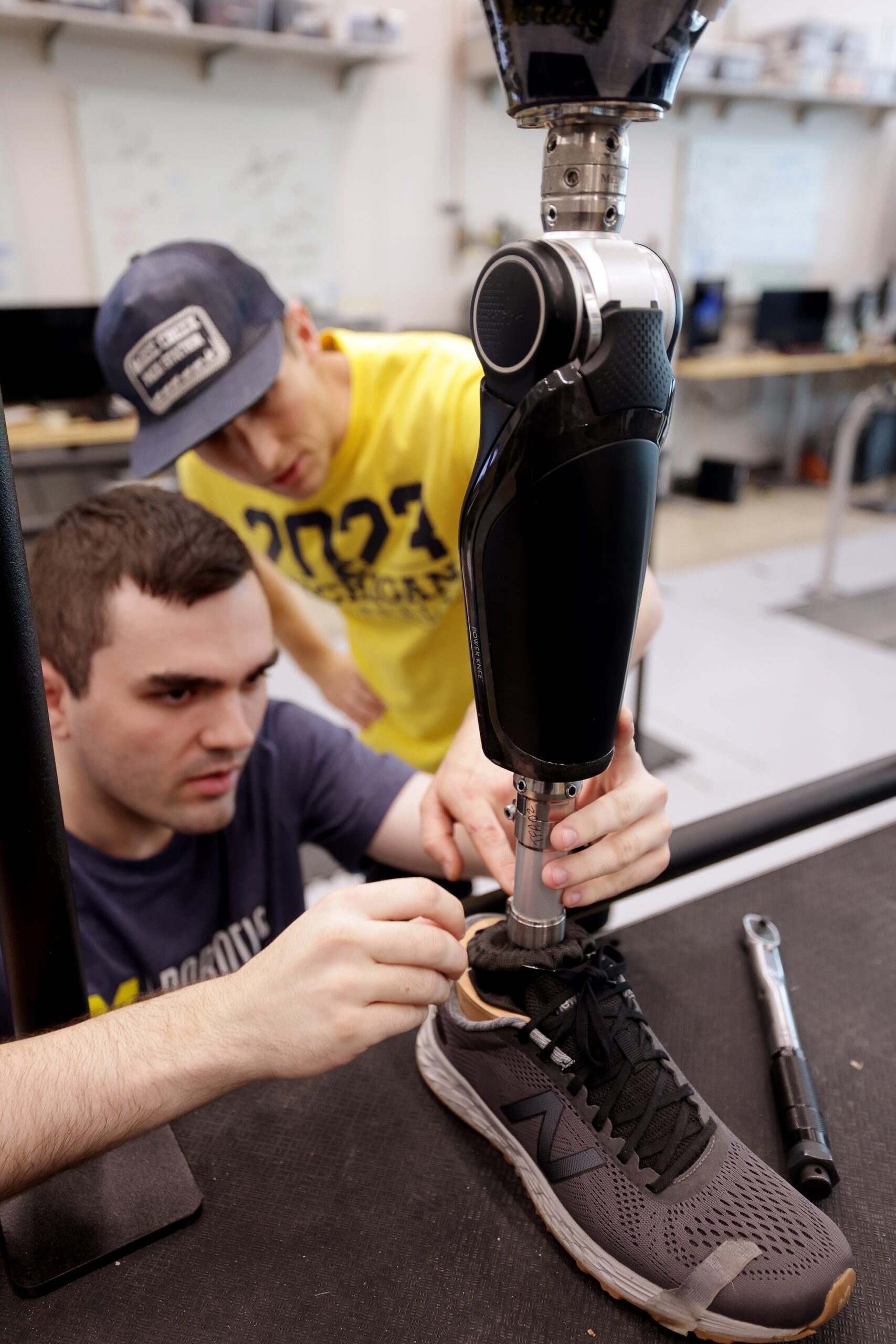
When paired with personalized management software, Össur’s powered knee prosthesis assisted study participants in sitting, standing, and walking with greater ease

A commercial robotic leg has the potential to benefit both high and low mobility amputees, as demonstrated by University of Michigan roboticists for the first time.
The leg exhibited the most significant improvements when the U-M team implemented its own control technique, facilitating a more symmetrical gait, reducing tripping hazards, and alleviating strain on the study participants’ sound legs and hips.
The Michigan researchers collaborated with Össur’s Power Knee, supplied by the company, with main funding sourced from the National Institutes of Health.
Several robotic prosthetic legs are available commercially but are not yet widely used in clinical settings. For many tasks, the lightness and simplicity of passive legs are favored by prosthesis users. However, in particularly demanding activities like rising from a chair, climbing stairs and slopes, and walking long distances, the integration of power can assist prosthesis users in being more active while also mitigating overuse injuries.

“The passive leg has a significant advantage in this study because participants use it daily and are very familiar with its functions. Our study participants only had two training sessions with the powered leg. Despite this limitation, we noted advantages of the powered leg with both our controller and Össur’s,” stated Robert Gregg, a robotics professor and corresponding author of the study in the Journal of NeuroEngineering and Rehabilitation.

“This study is important because there was previously insufficient evidence supporting the advantages of robotic knees over advanced passive knees, which is a major reason insurance companies typically do not finance robotic knees. Our findings begin to furnish this evidence.”
In this preliminary investigation, the researchers concentrated on essential daily living activities in which a powered prosthesis could offer significant advantages compared to passive knee prostheses. Study participants repeatedly sat and stood; walked briskly on a treadmill; and consistently sat in a chair, then walked, and sat down again.
Prosthesis users who needed additional walking assistance, such as a cane, discovered that the Power Knee provided considerable aid in all these activities. Those who maneuvered more easily with their prostheses exhibited the most enhancement in their gaits when Gregg’s team applied their unique control algorithm onto Össur’s leg. A recent amputee described it as the closest experience they felt to two-legged walking on a prosthesis.

“Our aim in prosthesis management is to replicate the behavior of the non-existent human limb as closely as possible to avert compensations that often result in overuse injuries. It is also significant because deviations in gait can attract unwanted attention to some users,” explained Kevin Best, a research associate in robotics, recent U-M robotics PhD graduate, and first author of the study.
The team explored two fundamentally distinct control methodologies. Össur’s more traditional controller relies on identifying specific aspects of the user’s motion, indicating their intended action. This renders the system very safe and predictable, but it may not always align with the user’s intentions, according to Gregg. For instance, in order to sit, users must wait for the knee to detect the sitting motion before it can bend, and the same applies to standing.
Conversely, the control strategy developed by Gregg’s group continuously adapts to the user’s motion. They formulated mathematical…
“`Here’s the revised text with synonyms and altered sentence structures while maintaining the HTML tags and format:
“`html
models of how humans navigate, founded on extensive datasets of unimpaired individuals. At every moment, their control algorithm evaluates the user’s thigh movement to ascertain the appropriate action, producing more organic knee motions that are better coordinated with the user.
“With advancements in robotic devices, it’s evident that robotic prosthetics hold immense potential for the amputee community,” expressed Jeff Wensman, a licensed prosthetist/orthotist at Michigan Medicine and co-author of the study. “I’m eager to witness the progress of a method aimed at providing powered prosthesis users with synchronized control. I believe this is a vital component in realizing powered prosthetics for amputees.”
This novel control algorithm is more challenging to master after years of using a traditional prosthesis, yet the repeated sit-to-stand trials indicated that participants were acquiring the skill. Instead of becoming increasingly fatigued with each attempt, they became quicker. Additionally, while walking, the more agile group exhibited two enhancements that could represent significant benefits.
Firstly, they raised the toe of the prosthetic foot higher, lessening the likelihood of stumbling over minor obstacles or uneven surfaces. Secondly, they didn’t have to swing their hips as vigorously to propel the prosthetic leg forward, suggesting that the powered knee and realistic control algorithm might potentially lessen back discomfort and enable users to travel farther before experiencing fatigue, although the team couldn’t gauge this within the limited study.
Moving forward, the team aims to validate the safety and efficacy of their control algorithm with stairs and ramps, followed by home-based assessments. With additional practice time, participants may achieve even greater results. If the control strategy proves effective, Össur could integrate elements of it into their own algorithm.
For the time being, the enhancements with Össur’s own algorithm were sufficient for two participants in the study to transition to the Power Knee as their everyday prosthesis, illustrating that robotic prosthetics are advancing from laboratory research to practical application.
Main funding from the National Institutes of Health was under award No. R01HD094772, with further support from the National Science Foundation. Össur provided initial financial backing and may have a financial stake in the outcomes.
The team has sought patent protection for their controller with the assistance of U-M Innovation Partnerships.
“`