
“`html
Engineers at MIT are entering the realm of robotic table tennis with a robust, lightweight creation that returns shots with exceptional speed and accuracy.
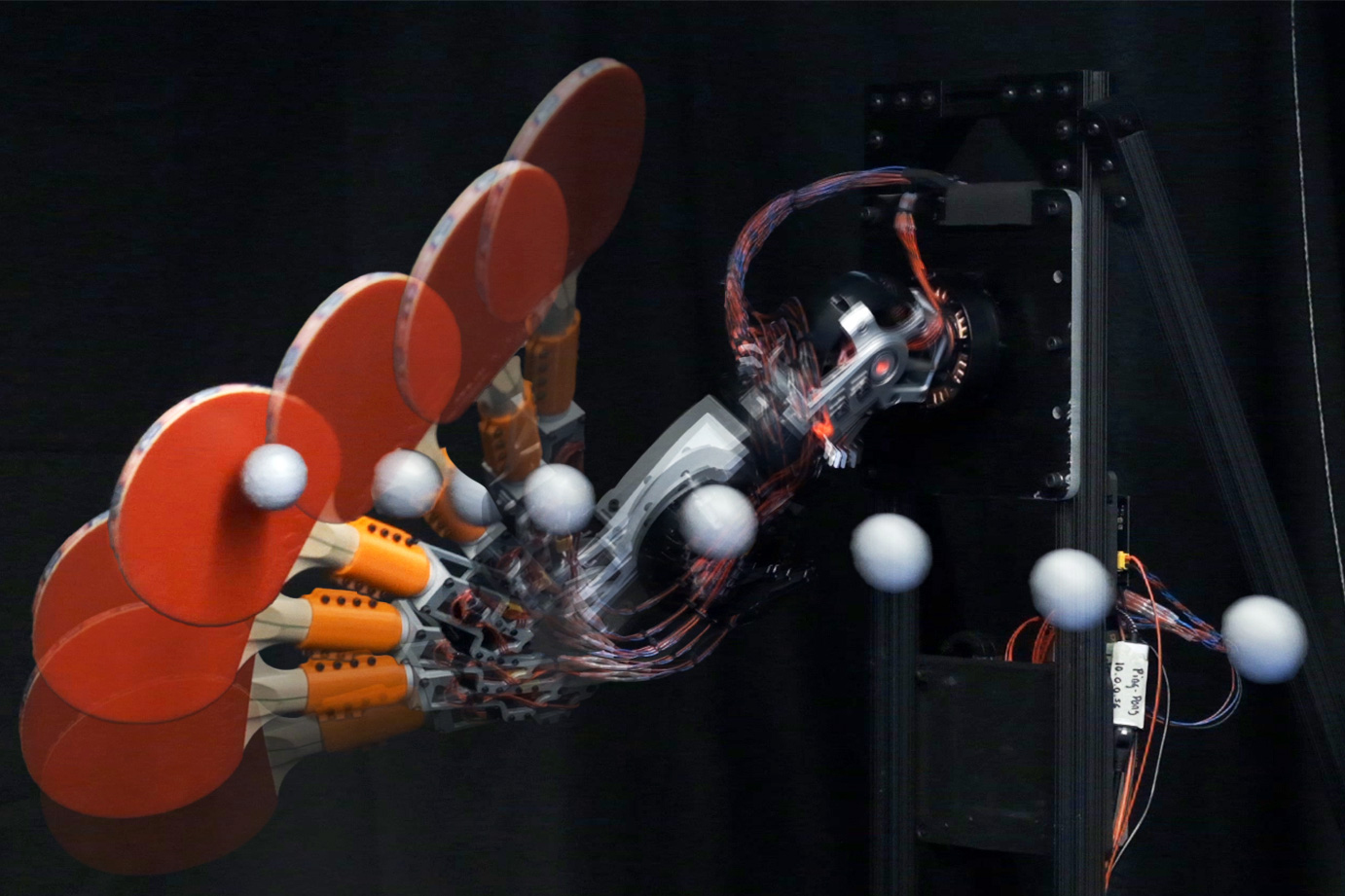
The innovative table tennis robotic system features a multi-jointed robotic arm attached to one end of a ping pong table, equipped with a standard ping pong paddle. Supported by several high-speed cameras and an advanced predictive control mechanism, the robot rapidly assesses the speed and path of an incoming ball and executes various swing styles — loop, drive, or chop — to accurately place the ball at a specified spot on the table with diverse spins.
During testing, the engineers launched 150 balls at the robot consecutively from the opposite side of the ping pong table. The robot successfully returned the balls with an accuracy rate of approximately 88 percent across all swing styles. The speed of the robot’s strikes nears the upper limits of human players’ return speeds and surpasses that of other robotic table tennis designs.
Currently, the team aims to expand the robot’s playable area so that it can return a broader range of shots. They foresee the system becoming a credible competitor in the expanding landscape of intelligent robotic training technologies.
Moreover, the team asserts that the table tennis technology could be adapted to enhance the agility and responsiveness of humanoid robots, especially in search-and-rescue situations, and scenarios where quick reactions or anticipations are essential.
“The challenges we are addressing, particularly related to intercepting objects swiftly and accurately, could be advantageous in contexts where a robot needs to perform dynamic movements and calculate where its end effector will engage an object in real-time,” states MIT graduate student David Nguyen.
Nguyen co-authored the new research alongside fellow MIT graduate student Kendrick Cancio and Sangbae Kim, associate professor of mechanical engineering and director of the MIT Biomimetics Robotics Lab. The researchers plan to unveil the findings from these experiments in a paper at the IEEE International Conference on Robotics and Automation (ICRA) this month.
Accurate gameplay
Creating robots capable of playing table tennis is a challenge that researchers have pursued since the 1980s. This problem necessitates a distinctive blend of technologies, including rapid machine vision, agile motors, precise control of manipulators, and accurate, real-time predictions, alongside strategic game planning.
“If you consider the range of control challenges in robotics, at one extreme you have manipulation, which is typically slow and extremely precise, like grasping an object securely. Conversely, at the other end is locomotion, which involves being dynamic and reacting to disruptions in the system,” explains Nguyen. “Table tennis occupies a middle ground. You are still engaging in manipulation, as precision in striking the ball is crucial, but you must accomplish it within 300 milliseconds. Thus, it merges the challenges of dynamic locomotion with precise manipulation.”
Table tennis robots have advanced significantly since the 1980s, with recent innovations from Omron and Google DeepMind utilizing artificial intelligence methods to “learn” from previous data, thereby enhancing a robot’s performance against an expanding variety of strokes and shots. These systems have proven to be swift and precise enough to rally with intermediate human players.
“These are highly specialized robots crafted for table tennis,” Cancio remarks. “With our robot, we are investigating how the methodologies used in table tennis could be applied to a more generalized system, like a humanoid or anthropomorphic robot capable of executing various useful tasks.”
Control of the game
For their recent design, the researchers adapted a lightweight, high-performance robotic arm that Kim’s lab engineered as part of the MIT Humanoid — a bipedal, dual-armed robot resembling a small child. The team is utilizing this robot to explore different dynamic movements, including traversing uneven and diverse terrains, as well as jumping, running, and performing backflips, with the aim of eventually deploying such robots for search-and-rescue missions.
Each arm of the humanoid possesses four joints, or degrees of freedom, each operated by an electric motor. Cancio, Nguyen, and Kim constructed a similar robotic arm, which they modified for table tennis by adding an extra degree of freedom in the wrist to facilitate paddle control.
The team secured the robotic arm to one end of a standard ping pong table and set up high-speed motion capture cameras around the table to monitor balls that bounce towards the robot. They also developed optimal control algorithms that predict, based on mathematical and physical principles, the speed and orientation of the paddle required to hit a ball with a specific swing type: loop (or topspin), drive (straight-on), or chop (backspin).
They executed the algorithms using three computers that concurrently processed camera footage, assessed a ball’s state in real-time, and converted these assessments into commands for the robot’s motors to react promptly and take a shot.
After consecutively bouncing 150 balls at the arm, the team discovered that the robot’s hit rate, or accuracy in returning the ball, was consistent across all three swing types: 88.4 percent for loop shots, 89.2 percent for chops, and 87.5 percent for drives. They subsequently fine-tuned the robot’s reaction time and found it strikes balls faster than existing systems, reaching speeds of 20 meters per second.
In their paper, the team reveals that the robot’s strike speed, or the velocity at which the paddle strikes the ball, averages 11 meters per second. Elite human players can return balls at speeds between 21 and 25 meters per second. Since documenting the results of their initial experiments, the researchers have further refined the system and have registered strike speeds of up to 19 meters per second (around 42 miles per hour).
“One of our project goals is to demonstrate that we can achieve a comparable level of athleticism to humans,” Nguyen states. “And regarding strike speed, we are getting extremely close.”
Their subsequent work has also enabled the robot to aim. The team integrated control algorithms that forecast not only how but also where to strike an incoming ball. With the latest iteration, the researchers can designate a target location on the table, and the robot will direct a ball to that specific spot.
Because it is anchored to the table, the robot’s mobility and range are limited, and it can primarily return balls arriving within a crescent-shaped zone around the midline of the table. In the future, the engineers aim to equip the robot on a gantry or wheeled platform, allowing it to cover more of the table and respond to a broader array of shots.
“One major aspect of table tennis involves predicting the spin and trajectory of the ball based on how your opponent hit it, which is information an automatic ball launcher cannot provide,” Cancio explains. “A robot like this could replicate the maneuvers an opponent would perform in a game setting, aiding humans in their practice and skill enhancement.”
This research receives partial support from the Robotics and AI Institute.
“`