
“`html
Engineered with a gel surface for drug transport and a magnetic surface for navigation, these microrobots can traverse intricate biological settings such as intestines
Microrobots constructed in droplets may facilitate precision-targeted drug delivery, surpassing I.V. delivery that only conveys 0.7% of the drug to the intended tissue, as per a recent Science Advances study carried out through simulations at the University of Michigan and tests at the University of Oxford.
An experiment simulating a treatment for inflammatory bowel disease, conducted on a pig intestine and backed by simulations, illustrated how the microrobots can be conveyed via catheter and guided to a target location using a magnetic field. The microrobots consist of two-faced particles made of gel that carries medications and magnets that facilitate their manipulation.
In the intestinal trial, when the gel dissolved, it released a dye that the researchers could detect to confirm that the chemical payload reached its intended spot. They also experimented with delayed release, with certain gels dissolving over extended durations. Post-delivery, the magnetic particles were directed back to the catheter for retrieval.
If released at various points, this capability could enhance treatment for inflammatory bowel disease, for example, administering multiple medications such as steroids, immunomodulators, and regenerative agents to diverse inflammation sites along the intestine.
The team likewise examined a minimally invasive surgery scenario utilizing a model of a human knee. The microrobots were introduced at an easily accessible location, then maneuvered to a hard-to-reach target area to deliver a dye before returning to the entry point for extraction.
“With this research, we are advancing toward highly sophisticated therapeutic delivery. Our refined fabrication techniques allow for the development of soft robotic systems with extraordinary features and motion abilities,” stated Molly Stevens, the John Black Professor of Bionanoscience at the University of Oxford Institute of Biomedical Engineering and co-senior author of the study.
The microrobots are produced by forcing a stream of gel containing magnetic particles through a narrow passage. A stream of oil enters the device and intersects with the gel, pinching off uniformly sized droplets. The magnetic gel particles settle at the bottom of the droplet while excess gel floats above.
The resulting constructs, referred to as permanent magnetic droplet-derived microrobots or PMDMs, measure approximately 0.2 millimeters, equivalent to the width of two human hairs.
“Conventional microrobot production has very low output. Utilizing microfluidics, we can create hundreds of microrobots in mere minutes. This substantially boosts efficiency and reduces fabrication costs,” remarked Yuanxiong Cao, a doctoral student in the Stevens Group at the University of Oxford and co-lead author of the study.
Simulations not only forecasted but also optimized the movement of the microrobots in relation to specific magnetic field frequencies. Simulated obstacle courses acted as a testing ground for maneuvering the microrobots through intricate contexts.
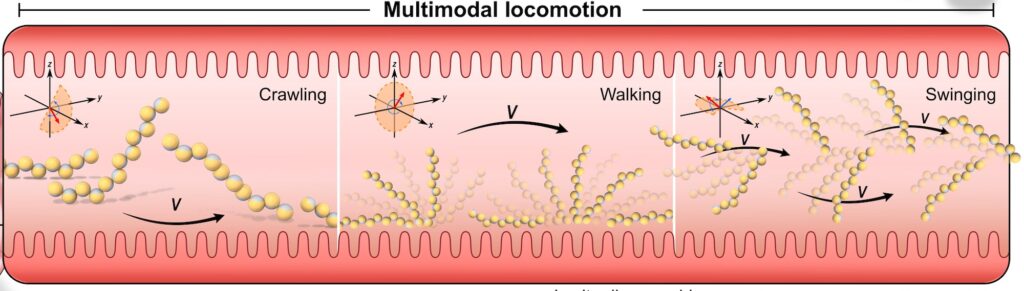
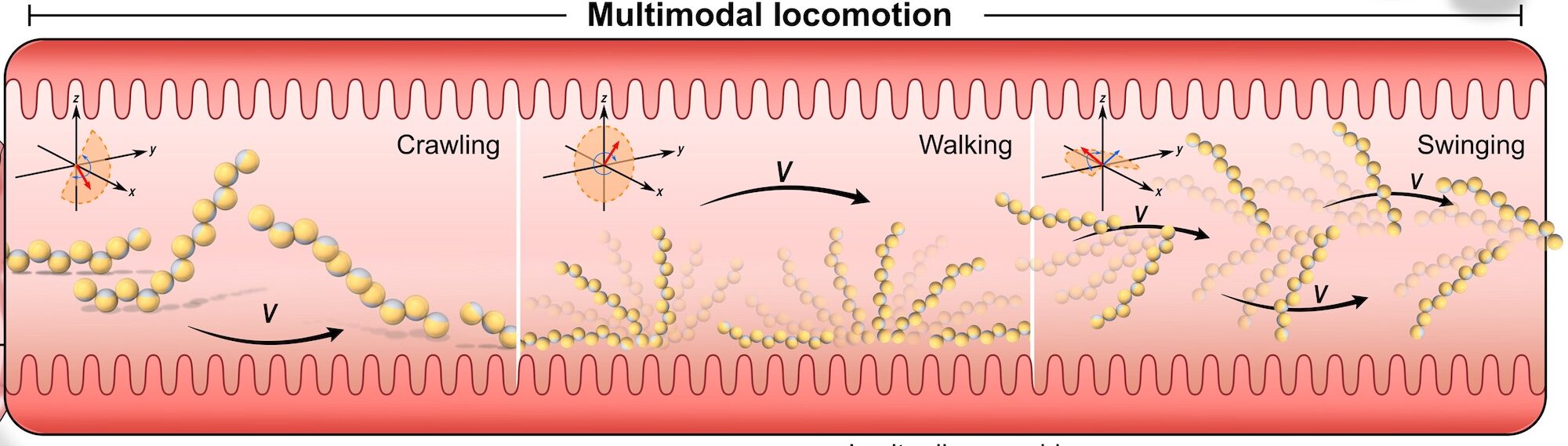
The physical system employs an electromagnet managed by commercial software, generating magnetic fields that form and transfer inch-worm-like chains of microrobots. The chains can move in three distinct manners, identified by the researchers as walking, crawling, or swinging. They are capable of disassembling and reassembling at will, enabling them to navigate narrow passages or overcome other barriers.
“I was astonished to observe the extent of control we possess over the various particles, especially during the assembly and disassembly cycles, based on the frequency of the magnetic field,” noted Philipp Schönhöfer, a co-lead author of the study and research investigator in chemical engineering at U-M in the group of Sharon Glotzer, the Anthony C. Lembke Department Chair of Chemical Engineering and co-senior author.
As a subsequent step, the research group is devising new microrobots that can navigate more complicated environments effectively. They plan to examine various particles within emulsions to ascertain how they attract one another and investigate how larger particle swarms respond to differing magnetic fields.
“With our computational platform, we have now created a sandbox to explore a broader design spectrum, which has already sparked concepts for more intricate microrobot architectures derived from the PMDM principle,” Schönhöfer expressed.
Researchers from the Imperial College of London also contributed to this study.
Individual researchers received funding from the University of Oxford, China Scholarship Council, Engineering and Physical Sciences Research Council, Rosetrees Trust, British Heart Foundation, U.K. Research and Innovation, U.K. Department of Science Innovation and Technology, Royal Academy of Engineering, and U.S. National Science Foundation.
Computational support was provided by Anvil at Purdue University and Advanced Research Computing at the University of Michigan.
“`