
Insect-sized robots are capable of squeezing into areas their larger peers cannot access, such as deep inside a collapsed structure to look for survivors after a seismic event.
Nonetheless, as they navigate through debris, tiny crawling robots may confront tall barriers they cannot scale or sloped surfaces they will slide down. Although aerial robots might dodge these obstacles, the energy expenditure required for flight would considerably restrict how far the robot could venture into the debris before returning to its base for recharging.
To merge the advantages of both modes of movement, MIT researchers have created a hopping robot that can spring over tall barriers and leap across slanted or uneven terrains, while consuming significantly less energy than an aerial robot.
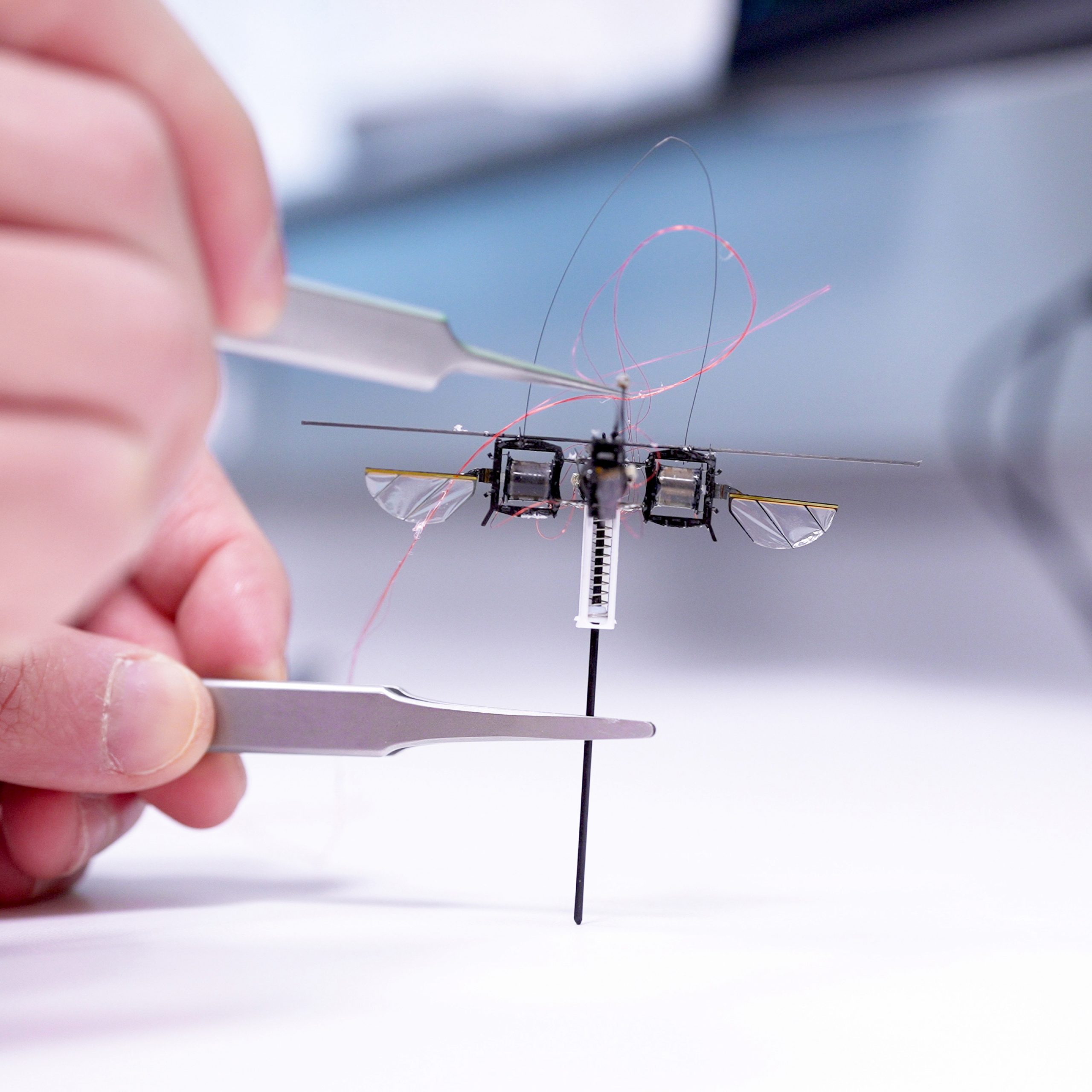
The hopping robot, which is smaller than a human thumb and lighter than a paperclip, features a spring-like leg that launches it off the ground, along with four flapping-wing modules that provide lift and manage its orientation.
This robot is capable of jumping approximately 20 centimeters into the air—four times its height—at a lateral velocity of about 30 centimeters per second, and it easily hops across icy, wet, and irregular soils, as well as onto a hovering drone. While doing so, the hopping robot expends about 60 percent less energy than its flying counterpart.
Due to its lightweight design and sturdiness, along with the energy-efficient hopping mechanism, this robot can carry around 10 times more payload than a similarly-sized aerial robot, paving the way for numerous new applications.
“Integrating batteries, circuits, and sensors is much more practical with a hopping robot compared to a flying one. We aspire that one day this robot could be deployed beyond the lab for real-world applications,” states Yi-Hsuan (Nemo) Hsiao, an MIT graduate student and co-lead author of a paper describing the hopping robot.
Hsiao collaborates on the paper with co-leads Songnan Bai, a research assistant professor at the City University of Hong Kong; and Zhongtao Guan, an incoming MIT graduate student who executed this work during a visiting undergraduate stint; alongside Suhan Kim and Zhijian Ren of MIT; as well as senior authors Pakpong Chirarattananon, an associate professor at the City University of Hong Kong; and Kevin Chen, an associate professor in the MIT Department of Electrical Engineering and Computer Science and head of the Soft and Micro Robotics Laboratory within the Research Laboratory of Electronics. The research is published today in Science Advances.
Maximizing Efficiency
Leaping is prevalent among insects, including fleas that jump onto new hosts and grasshoppers that bounce through meadows. Although less common among insect-sized robots, which typically either fly or crawl, hopping offers numerous benefits regarding energy efficiency.
When a robot leaps, it converts potential energy, derived from its height above the ground, into kinetic energy as it descends. This kinetic energy reverts back to potential energy upon impact with the ground, then back to kinetic as it ascends, and this cycle continues.
To enhance the efficiency of this process, the MIT robot is outfitted with an elastic leg constructed from a compression spring, similar to the spring in a click pen. This spring converts the robot’s downward speed into upward speed upon striking the ground.
“With a perfectly ideal spring, your robot could simply hop along without any energy loss. However, our spring isn’t quite ideal, so we utilize the flapping modules to make up for the slight amount of energy lost upon ground contact,” explains Hsiao.
As the robot bounces back into the air, the flapping wings provide lift while ensuring that the robot remains upright and properly oriented for its subsequent jump. Its four flapping-wing components are driven by soft actuators or artificial muscles robust enough to withstand repeated impacts without damage.
“We have utilized the same robot throughout this entire series of experiments without ever needing to pause for repairs,” Hsiao adds.
Crucial to the robot’s functionality is a rapid control mechanism that determines its orientation for the next leap. Sensing is executed through an external motion-tracking system, while an observer algorithm computes the necessary control data based on sensor readings.
As the robot jumps, it follows a ballistic path, curving through the air. At the apex of this arc, it predicts its landing spot. Then, using this target landing point, the controller figures out the required takeoff speed for the subsequent jump. While airborne, the robot flaps its wings to fine-tune its orientation so it impacts the ground with the correct angle and axis to ensure movement in the intended direction and at the appropriate velocity.
Durability and Adaptability
The researchers rigorously tested the hopping robot, along with its control system, across various surfaces including grass, ice, wet glass, and uneven terrain — it successfully navigated all surfaces. The robot was even able to hop on a dynamically tilting surface.
“The robot isn’t particularly concerned about the angle of the surface it lands on. As long as it doesn’t slip upon impact, it will perform well,” Hsiao notes.
Because the controller is adept at managing diverse terrains, the robot can effortlessly shift from one surface to another without disruption.
For example, hopping across grass necessitates more thrust than hopping over glass, since grass blades create a damping effect that lowers its jump height. The controller can channel additional energy to the robot’s wings during the aerial phase to compensate for this.
Given its small stature and lightweight build, the robot has an even smaller moment of inertia, thereby making it more agile than larger robots and more adept at surviving collisions.
The researchers displayed its agility by executing acrobatic flips. The featherlight robot could also hop onto an airborne drone without causing damage to either machine, which could be beneficial in cooperative tasks.
Moreover, while the team exhibited a hopping robot that could carry double its weight, the maximum payload capacity might be much greater. Adding more weight does not impede the robot’s efficiency; rather, the spring’s efficiency is the predominant element that limits its carrying capacity.
In the future, the researchers intend to exploit its ability to bear substantial loads by incorporating batteries, sensors, and other circuits onto the robot, with the aspiration of enabling it to autonomously hop outside of the lab.
“Multimodal robots, those that combine various movement strategies, are generally challenging to create and particularly remarkable at such a small scale. The adaptability of this tiny multimodal robot—flipping, jumping on irregular or shifting terrains, and even onto another robot—makes it even more impressive,” states Justin Yim, assistant professor at the University of Illinois at Urbana-Champagne, who was not part of this project. “The continuous hopping demonstrated in this research allows for agile and efficient movement in environments packed with large obstacles.”
This research is partially funded by the U.S. National Science Foundation and the MIT MISTI program. Chirarattananon received support from the Research Grants Council of the Hong Kong Special Administrative Region of China. Hsiao is supported by a MathWorks Fellowship, and Kim is supported by a Zakhartchenko Fellowship.