In the forthcoming era, self-sufficient drones could be utilized to transport goods between expansive storage facilities. A drone could navigate into a dimly lit establishment the size of several football fields, swiftly moving through hundreds of uniform aisles before arriving at the exact location where its delivery is needed.
Many of today’s drones would probably find it challenging to accomplish this role, as drones usually maneuver outside using GPS, which is ineffective in enclosed surroundings. For indoor navigation, some drones utilize computer vision or lidar, yet both methods tend to be unreliable in dimly lit spaces or areas with plain walls or repetitive patterns.
Researchers from MIT have devised a novel strategy that allows a drone to self-localize, or ascertain its location, in indoor, dark, and low-visibility settings. Self-localization is a crucial component of autonomous navigation.
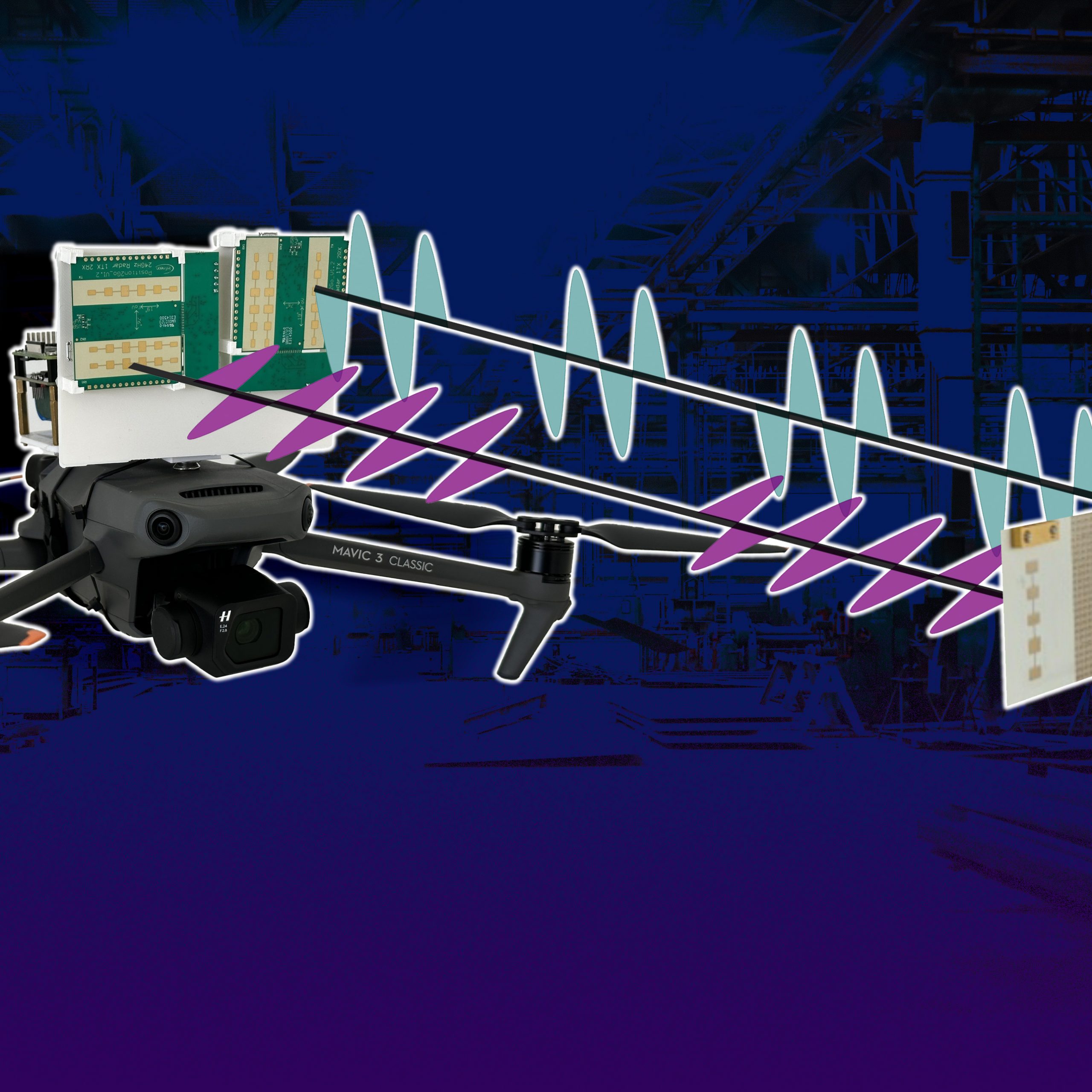
The scientists created a system known as MiFly, whereby a drone utilizes radio frequency (RF) waves, reflected by a single tag placed within its vicinity, to self-localize autonomously.
Since MiFly facilitates self-localization using just one small tag, which could be adhered to a wall like a sticker, it is less costly and simpler to deploy compared to systems requiring multiple tags. Furthermore, as the MiFly tag reflects signals emitted by the drone instead of generating its own, it can operate with minimal power consumption.
Two commercially available radars installed on the drone allow it to determine its position concerning the tag. These measurements are combined with data from the drone’s onboard computer, enabling it to estimate its path.
The researchers performed numerous flight trials with actual drones in indoor environments, and discovered that MiFly consistently localized the drone to within less than 7 centimeters.
“As our comprehension of perception and computation advances, we often overlook signals that lie beyond the visible spectrum. Here, we have explored beyond GPS and computer vision to millimeter waves, and in doing so, we have unveiled new capabilities for drones in indoor settings that were previously unattainable,” comments Fadel Adib, associate professor in the Department of Electrical Engineering and Computer Science, director of the Signal Kinetics group at the MIT Media Lab, and senior author of a publication on MiFly.
Co-lead authors and research assistants Maisy Lam and Laura Dodds join Adib in the study; Aline Eid, a former postdoctoral researcher now an assistant professor at the University of Michigan; and Jimmy Hester, CTO and co-founder of Atheraxon, Inc. The findings will be presented at the IEEE Conference on Computer Communications.
Backscattered signals
In order for drones to self-localize within dark, indoor settings, the researchers opted to employ millimeter wave signals. Millimeter waves, frequently utilized in contemporary radars and 5G communication technologies, function in darkness and can penetrate everyday materials like cardboard, plastic, and internal walls.
The team aimed to create a system that could operate effectively with a single tag, ensuring cost-effectiveness and ease of implementation in commercial spaces. To maintain low energy consumption, they designed a backscatter tag that reflects millimeter wave signals transmitted by a drone’s onboard radar. The drone employs these reflections for self-localization.
However, the drone’s radar would capture signals reflected from various elements in the environment, not solely the tag. The researchers addressed this issue by using a technique called modulation. They configured the tag to introduce a slight frequency to the signal it scatters back toward the drone.
“Now, reflections from the surrounding environment return at one frequency, while reflections from the tag return at a different frequency. This allows us to differentiate the responses and focus on the response from the tag,” Dodds explains.
Nevertheless, using just one tag and one radar limited the researchers to calculating distance metrics. They required multiple signals to accurately determine the drone’s location.
Rather than introducing additional tags, they integrated a second radar onto the drone, positioning one horizontally and one vertically. The horizontal radar operates with a horizontal polarization, transmitting signals horizontally, whereas the vertical radar functions with vertical polarization.
They incorporated polarization into the tag’s antennas, allowing it to isolate the individual signals emitted by each radar.
“Polarized sunglasses detect a specific light polarization and obstruct other polarizations. We applied a similar principle to millimeter waves,” Lam clarifies.
Moreover, they assigned different modulation frequencies to the vertical and horizontal signals, further minimizing interference.
Accurate location estimation
This dual-polarization and dual-modulation framework provides the drone’s spatial position. However, drones also move at angles and rotate, necessitating that a drone estimates its location in space with respect to six degrees of freedom — including trajectory data such as pitch, yaw, and roll in addition to the usual forward/backward, left/right, and up/down movements.
“The rotation of the drone introduces significant ambiguity to the millimeter wave measurements. This presents a considerable challenge as drones tend to rotate frequently during flight,” Dodds remarks.
The researchers surmounted these obstacles by using the drone’s onboard inertial measurement unit, a sensor that detects acceleration along with variations in altitude and orientation. By integrating this information with the millimeter wave measurements reflected by the tag, MiFly can estimate the complete six-degree-of-freedom orientation of the drone in just a few milliseconds.
They evaluated a MiFly-equipped drone in various indoor settings, such as their laboratory, the flight area at MIT, and the low-light tunnels beneath the campus structures. The system consistently achieved high accuracy across all environments, localizing the drone to within 7 centimeters during many trials.
Furthermore, the system maintained nearly as high accuracy even when the tag was obstructed from the drone’s view. Reliable localization estimates were achieved up to 6 meters from the tag.
This distance could potentially be augmented in future applications with additional hardware, such as high-power amplifiers, or by refining the radar and antenna design. The researchers also intend to pursue further research by integrating MiFly into an autonomous navigation framework. This could allow a drone to determine its flight path and execute a route using millimeter wave technology.
“The infrastructure and localization algorithms we are developing for this project provide a solid foundation to enhance robustness and facilitate various commercial applications,” Lam states.
This research is partially funded by the National Science Foundation and the MIT Media Lab.